Publications
Publications by categories in reversed chronological order. For most papers, the authors are listed alphabetically. See Google Scholar for the latest updates.
2024
-
-
 Near-Optimal Coverage Path Planning with Turn CostsIn 2024 Proceedings of the Symposium on Algorithm Engineering and Experiments (ALENEX) , Jan 2024
Near-Optimal Coverage Path Planning with Turn CostsIn 2024 Proceedings of the Symposium on Algorithm Engineering and Experiments (ALENEX) , Jan 2024


2023
-
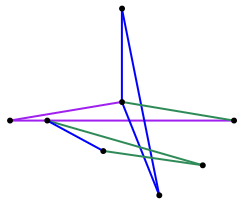
 The Lawn Mowing Problem: From Algebra to AlgorithmsIn 31st Annual European Symposium on Algorithms (ESA 2023) , Jan 2023
The Lawn Mowing Problem: From Algebra to AlgorithmsIn 31st Annual European Symposium on Algorithms (ESA 2023) , Jan 2023 -
 A Closer Cut: Computing Near-Optimal Lawn Mowing ToursIn 2023 Proceedings of the Symposium on Algorithm Engineering and Experiments (ALENEX) , Jan 2023
A Closer Cut: Computing Near-Optimal Lawn Mowing ToursIn 2023 Proceedings of the Symposium on Algorithm Engineering and Experiments (ALENEX) , Jan 2023 -
 Minimum Partition into Plane Subgraphs: The CG:SHOP Challenge 2022ACM J. Exp. Algorithmics, Aug 2023
Minimum Partition into Plane Subgraphs: The CG:SHOP Challenge 2022ACM J. Exp. Algorithmics, Aug 2023



2022
-
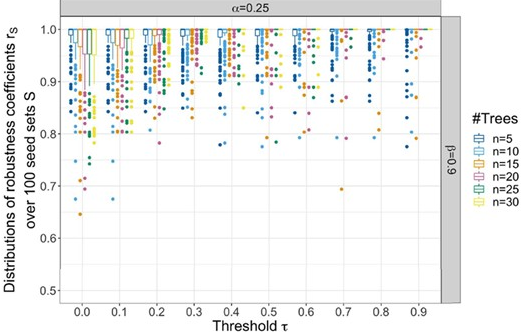 Robust disease module mining via enumeration of diverse prize-collecting Steiner treesBioinformatics, Jan 2022
Robust disease module mining via enumeration of diverse prize-collecting Steiner treesBioinformatics, Jan 2022 - Minimum Scan Cover and Variants: Theory and ExperimentsACM Journal of Experimental Algorithmics, Jan 2022
- Computing coordinated motion plans for robot swarms: The cg: shop challenge 2021ACM Journal of Experimental Algorithmics (JEA), Jan 2022
- Area-optimal simple polygonalizations: The CG challenge 2019Journal of Experimental Algorithmics (JEA), Jan 2022
-



2021
-
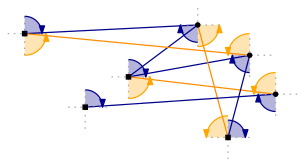
- Minimum Scan Cover and Variants - Theory and ExperimentsIn 19th International Symposium on Experimental Algorithms, SEA 2021, June 7-9, 2021, Nice, France , May 2021

2020
- Towards the Automated Operations of Large Distributed Satellite Systems. Part 1: Review and Paradigm ShiftsAdvances in Space Research, Aug 2020
- Towards the Automated Operations of Large Distributed Satellite Systems. Part 2: Classifications and ToolsAdvances in Space Research, Sep 2020
- Tilt Assembly: Algorithms for Micro-factories That Build Objects with Uniform External ForcesAlgorithmica, Sep 2020
- Minimum Scan Cover with Angular Transition CostsIn 36th International Symposium on Computational Geometry, SoCG 2020, June 23-26, 2020, Zürich, Switzerland , Sep 2020
- Targeted Drug Delivery: Algorithmic Methods for Collecting a Swarm of Particles with Uniform, External ForcesIn 2020 IEEE International Conference on Robotics and Automation, ICRA 2020, Paris, France, May 31 - August 31, 2020 , Sep 2020
- Probing a Set of Trajectories to Maximize Captured InformationIn 18th International Symposium on Experimental Algorithms, SEA 2020, June 16-18, 2020, Catania, Italy , Sep 2020
2019
- Automated Constellation Management With Self-Regulating Data-Economic ActorsIn 70th International Astronautical Congress (IAC) , Oct 2019
-
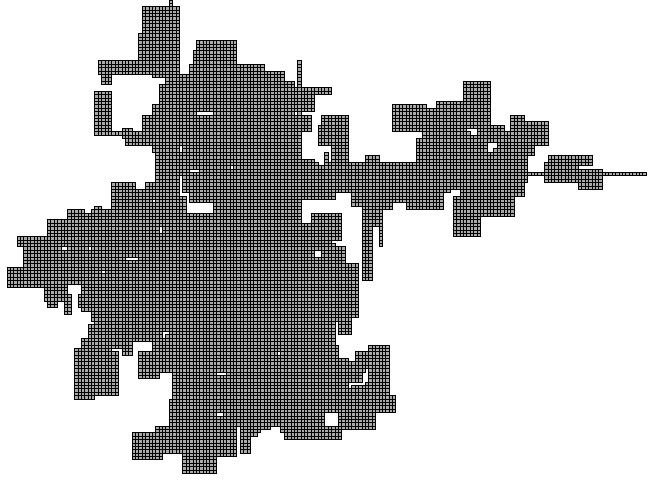 Practical Methods for Computing Large Covering Tours and Cycle Covers with Turn CostIn Proceedings of the Twenty-First Workshop on Algorithm Engineering and Experiments, ALENEX 2019, San Diego, CA, USA, January 7-8, 2019 , Oct 2019
Practical Methods for Computing Large Covering Tours and Cycle Covers with Turn CostIn Proceedings of the Twenty-First Workshop on Algorithm Engineering and Experiments, ALENEX 2019, San Diego, CA, USA, January 7-8, 2019 , Oct 2019 - Automated Data Retrieval from Large-Scale Distributed Satellite SystemsIn 15th IEEE International Conference on Automation Science and Engineering, CASE 2019, Vancouver, BC, Canada, August 22-26, 2019 , Oct 2019
-
 Covering Tours and Cycle Covers with Turn Costs: Hardness and ApproximationIn Algorithms and Complexity - 11th International Conference, CIAC 2019, Rome, Italy, May 27-29, 2019, Proceedings , Oct 2019
Covering Tours and Cycle Covers with Turn Costs: Hardness and ApproximationIn Algorithms and Complexity - 11th International Conference, CIAC 2019, Rome, Italy, May 27-29, 2019, Proceedings , Oct 2019


2018
- Using a UAV for Destructive Surveys of Mosquito PopulationIn 2018 IEEE International Conference on Robotics and Automation, ICRA 2018, Brisbane, Australia, May 21-25, 2018 , Oct 2018
- On Designing 2D Discrete Workspaces to Sort or Classify PolynminoesIn 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2018, Madrid, Spain, October 1-5, 2018 , Oct 2018
2017
- Computing nonsimple polygons of minimum perimeterJ. Comput. Geom., Oct 2017
- Zapping Zika with a Mosquito-Managing Drone: Computing Optimal Flight Patterns with Minimum Turn Cost (Multimedia Contribution)In 33rd International Symposium on Computational Geometry, SoCG 2017, July 4-7, 2017, Brisbane, Australia , Oct 2017
- Mapping and coverage with a particle swarm controlled by uniform inputsIn 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2017, Vancouver, BC, Canada, September 24-28, 2017 , Oct 2017
- Tilt Assembly: Algorithms for Micro-Factories that Build Objects with Uniform External ForcesIn 28th International Symposium on Algorithms and Computation, ISAAC 2017, December 9-12, 2017, Phuket, Thailand , Oct 2017
2016
- Algorithmic methods for complex dynamic sweeping problemsOct 2016
- Collecting a swarm in a grid environment using shared, global inputsIn IEEE International Conference on Automation Science and Engineering, CASE 2016, Fort Worth, TX, USA, August 21-25, 2016 , Oct 2016
- Computing Nonsimple Polygons of Minimum PerimeterIn Experimental Algorithms - 15th International Symposium, SEA 2016, St. Petersburg, Russia, June 5-8, 2016, Proceedings , Oct 2016
2015
-
 Distributed cohesive control for robot swarms: Maintaining good connectivity in the presence of exterior forcesIn 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2015, Hamburg, Germany, September 28 - October 2, 2015 , Oct 2015
Distributed cohesive control for robot swarms: Maintaining good connectivity in the presence of exterior forcesIn 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2015, Hamburg, Germany, September 28 - October 2, 2015 , Oct 2015 - A parallel distributed strategy for arraying a scattered robot swarmIn 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2015, Hamburg, Germany, September 28 - October 2, 2015 , Oct 2015

2014
- Distributed, scalable algorithmic methods for swarms with multiple leader robotsOct 2014
- Panic Room: Experiencing Overload and Having Fun in the ProcessIn Distributed, Ambient, and Pervasive Interactions - Second International Conference, DAPI 2014, Held as Part of HCI Interational 2014, Heraklion, Crete, Greece, June 22-27, 2014. Proceedings , Oct 2014